
Try 8978
Category: Robomow
Demo mode On/Off

Press “Settings” + “Home” buttons more than 2 seconds. Use code 1995 to set Demo Mode On/Off
Robomow with defective drive unit

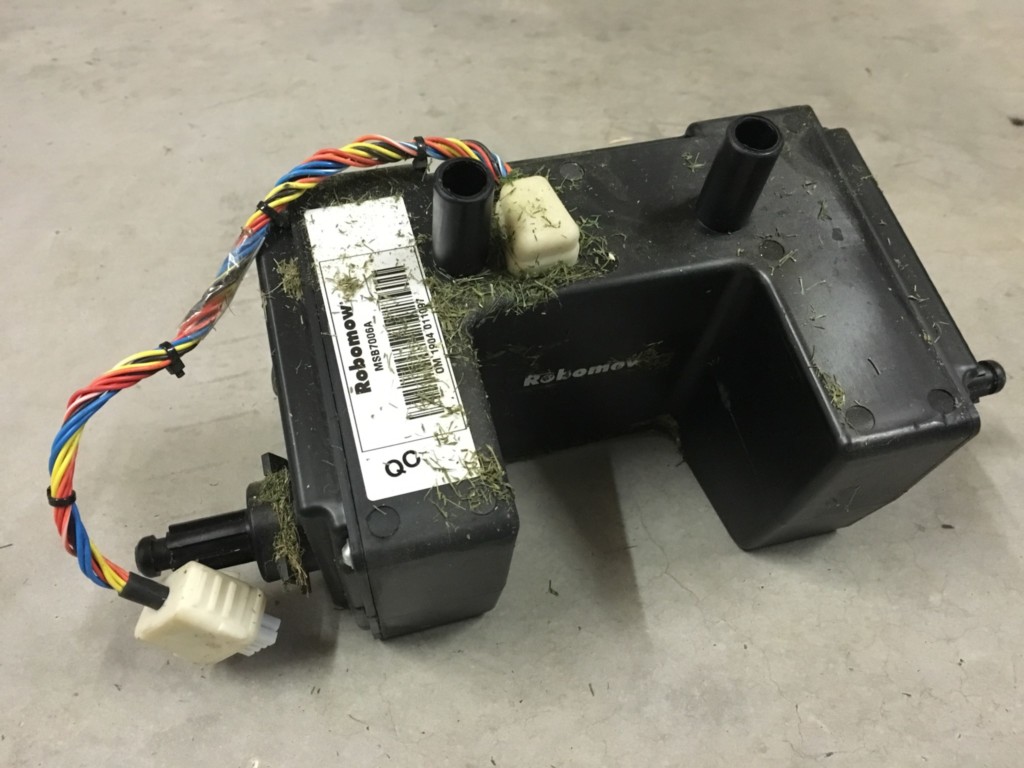 I had an issue with my MC300. One day, the mower was outside of the lawn. After putting it back and starting the program manually it went again directly outside the lawn. After checking the wheels (spin the wheels manually), one of them was overrunning. After calling Robomow Support, they sent me a replacement unit for the defect part. The replacement is quite easy and done within 5 minutes:
I had an issue with my MC300. One day, the mower was outside of the lawn. After putting it back and starting the program manually it went again directly outside the lawn. After checking the wheels (spin the wheels manually), one of them was overrunning. After calling Robomow Support, they sent me a replacement unit for the defect part. The replacement is quite easy and done within 5 minutes:
- Turn off Robomow
- Remove the wheels (screwdriver)
- Remove the battery pack
- Replace the unit
- Mount battery pack and wheels
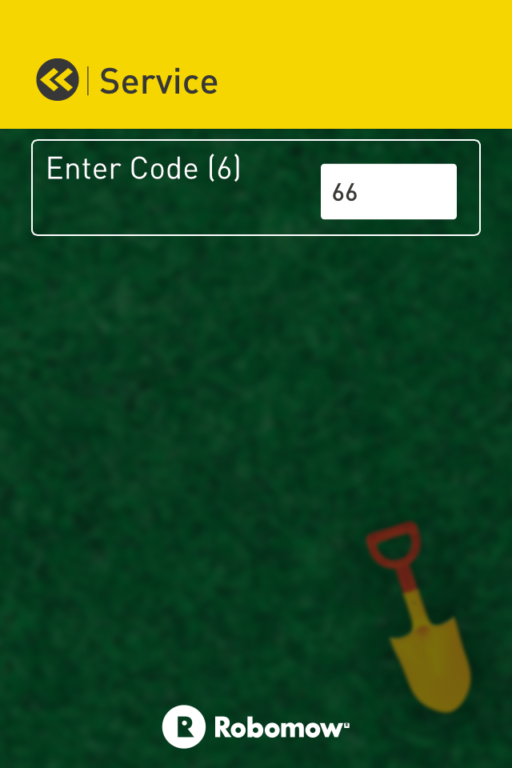
Robomow Service Code Formula
((2 * SERVICECOUNTER) -1) * SERVICECOUNTER
Rebomow service menu and description

No responsibility is accepted for the accuracy of this information!!!
Robomow Service Settings
- Get into Service Settings with iOS App: Service Settings, Enter code, open Service Settings
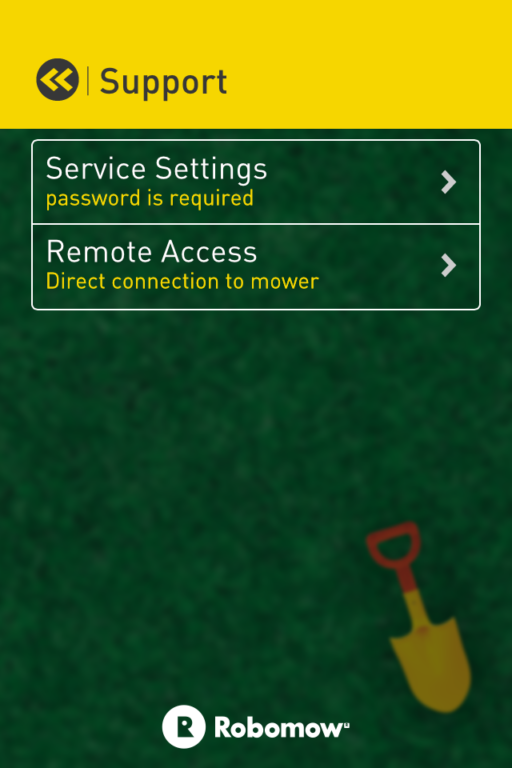
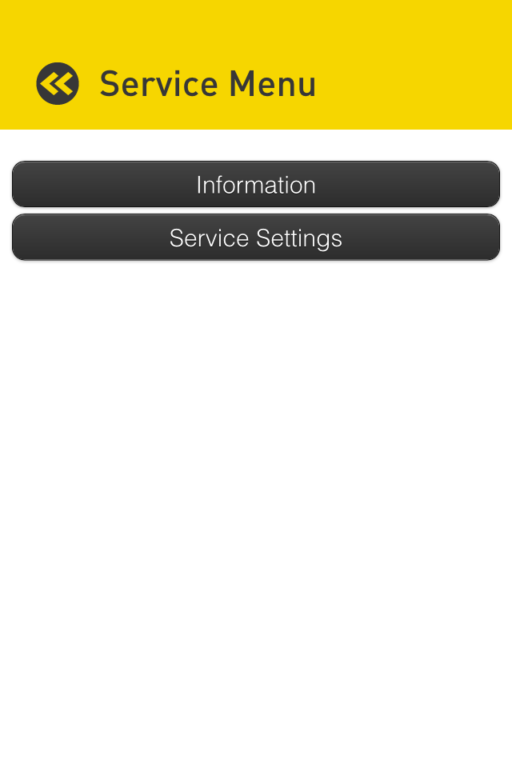
Service Settings
- Mowing Motor
- Eco Mode
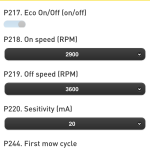
- P217: Eco On/Off
- Default: On
- P218: On Speed (RPM)
- Default: 3300
- Values: 2500 – 3500
- Optimal value: 2900
- P219: Off speed (RPM)
- Default: 4000
- Values: 3500 – 4500
- Optimal value: 3600
- P220: Sensitivity (mA) – Sensitivity to change mode from eco to Turbo
- Default: 20
- Optimal value: ???
- P217: Eco On/Off
- Eco Mode

- Bumper
- P239: Sensitivity (mA)
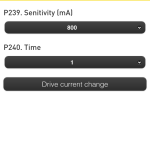
- Default value: 1200
- Values: ???
- Optimal value: 800
- P240: Time – Detection time of an obstacle
- Default value: 2
- Values: 1-5
- Optimal value: 1
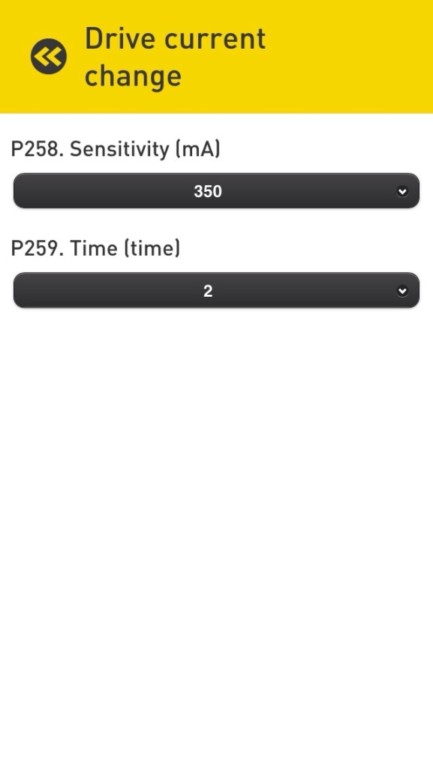
- Drive current change
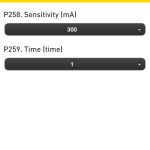
- P258: Sensitivity (mA)
- Default value: 350
- Optimal value: 300
- P259: Time
- Default value: 2
- Optimal value: 1
- P270 – Edge mowing in Eco Mode (Recommendation: ON)
- Default: OFF
- Values: ON / OFF
- Optimal value: ON
- P258: Sensitivity (mA)
- P239: Sensitivity (mA)
- Temperature
- P257 – Enable / disable the minimum temperature at which an automatic start is prevented
- Default: ON
- Values: On / Off
- Optimal value: ON
- P281 – Setting the minimum temperature
- Default: 5°
- Values: -10°- +10°
- P257 – Enable / disable the minimum temperature at which an automatic start is prevented
- Base Station
- P201 – Detect Distance (meters)
- At what distance before LS ” near wire follow ” is deactivated via Bluetooth
- Default: 5 meters
- Values: 1 – 10 meters
- P202 – Telemetry (on/off)
- Default: On
- P203 – Search Capacity (mA/h)
- minimal capacity to start search for base station
- Default: 1000
- Values: 500 – 2000
- P263 – Search voltage – Zone Main (mV)
- minimal voltage to start search for base station
- Default 3000
- Values: 2500 – 5000
- P207 – Back from Wire (When OFF it does not returns when he has found the wire. When ON, it moves the way back before he turns. With OFF Robomow turns always at the same distance to the wire which could create lanes in the lawn .)
- Default: ON
- Values: ON, OFF
- P208 – Return way of P207
- Values: 1-50cm
- Default: 40cm
- P201 – Detect Distance (meters)
Restart one time setup on Robomow

C model
press and hold “STOP” + “Setting” + “left” for at least 4 seconds
S model
press and hold “STOP” + “down” for at least 4 seconds
Hardware Reset your Robomow
C model
press and hold “OK” for at least 4 seconds
S model
press and hold “GO” for at least 4 seconds
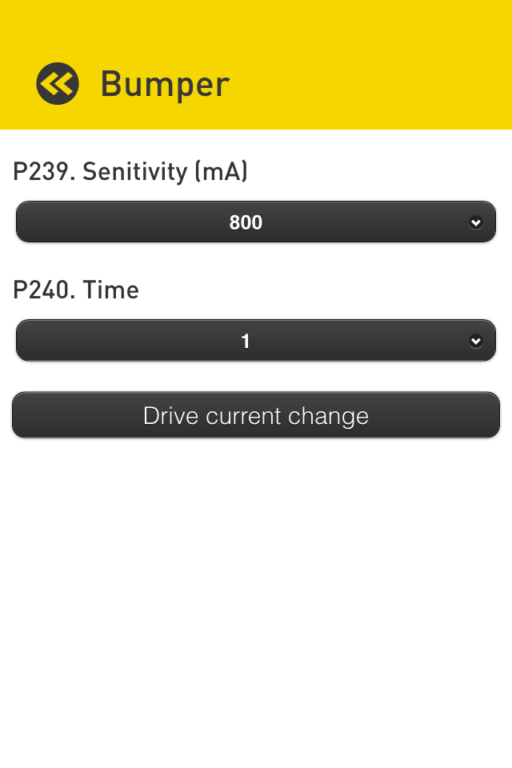
Robomow Bumper sensibility
To make the bumper more sensible when driving against an obstacle, there are some interesting values in the service menu.
The default values are:
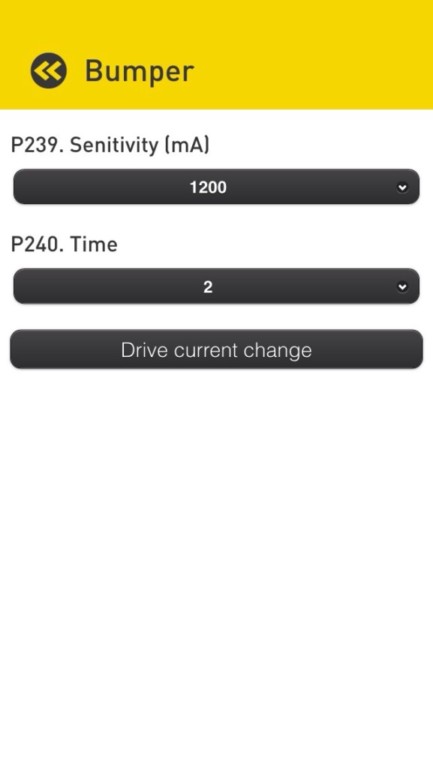
P239: Sensitivity (mA)
P240: Time
P258: Sensitivity (mA)
P259: Time
My current setting for these values are:

